
I början av 2015 letade jag efter en lite stabilare (läs kolfiber) ram och det blev en ”Killer Bee” från BirdsEye.
Bestyckning och montering har varit ett långsiktigt projekt för min ZMR-250 har varit i luften hela sommaren men nu har jag kommit igång.
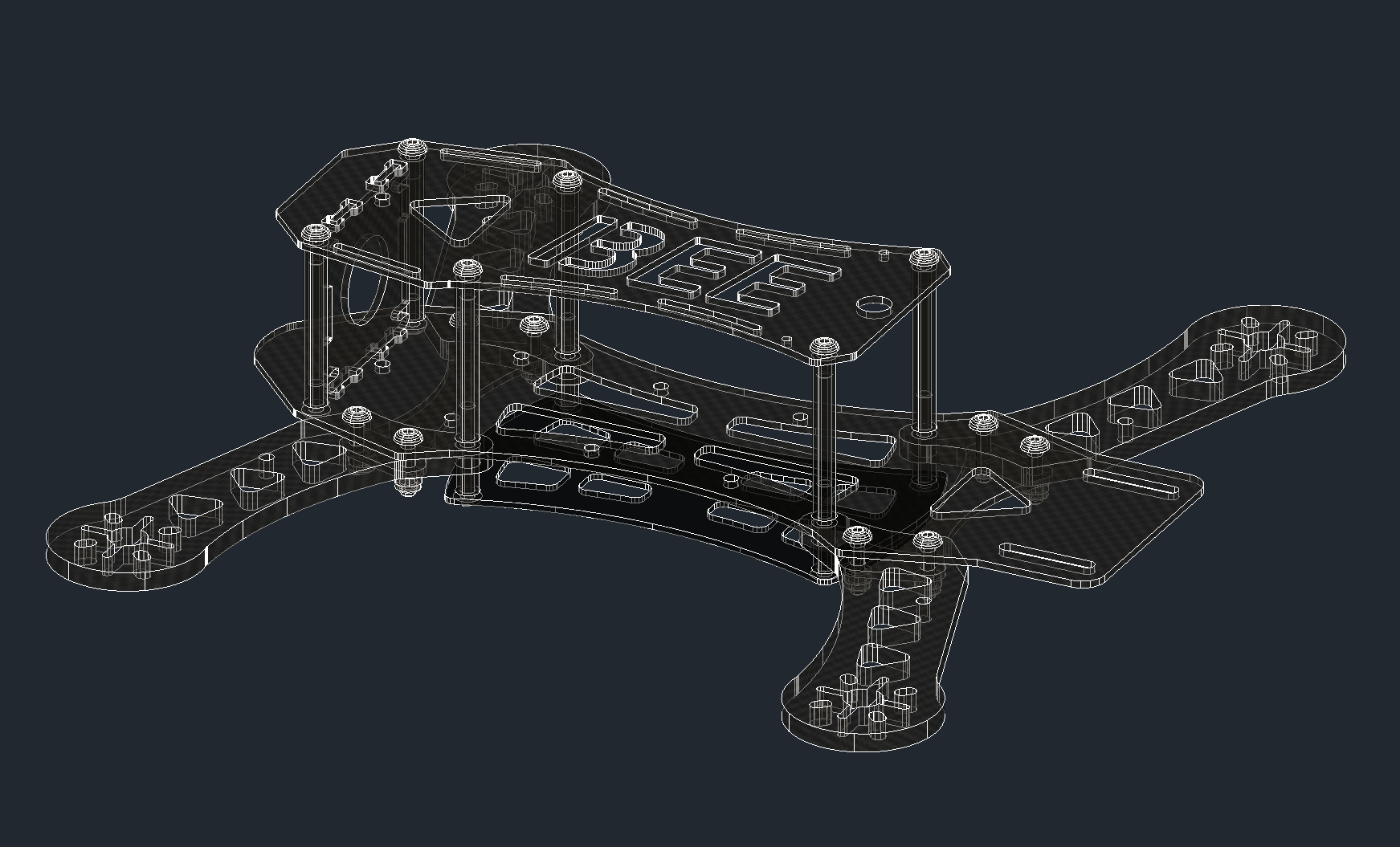
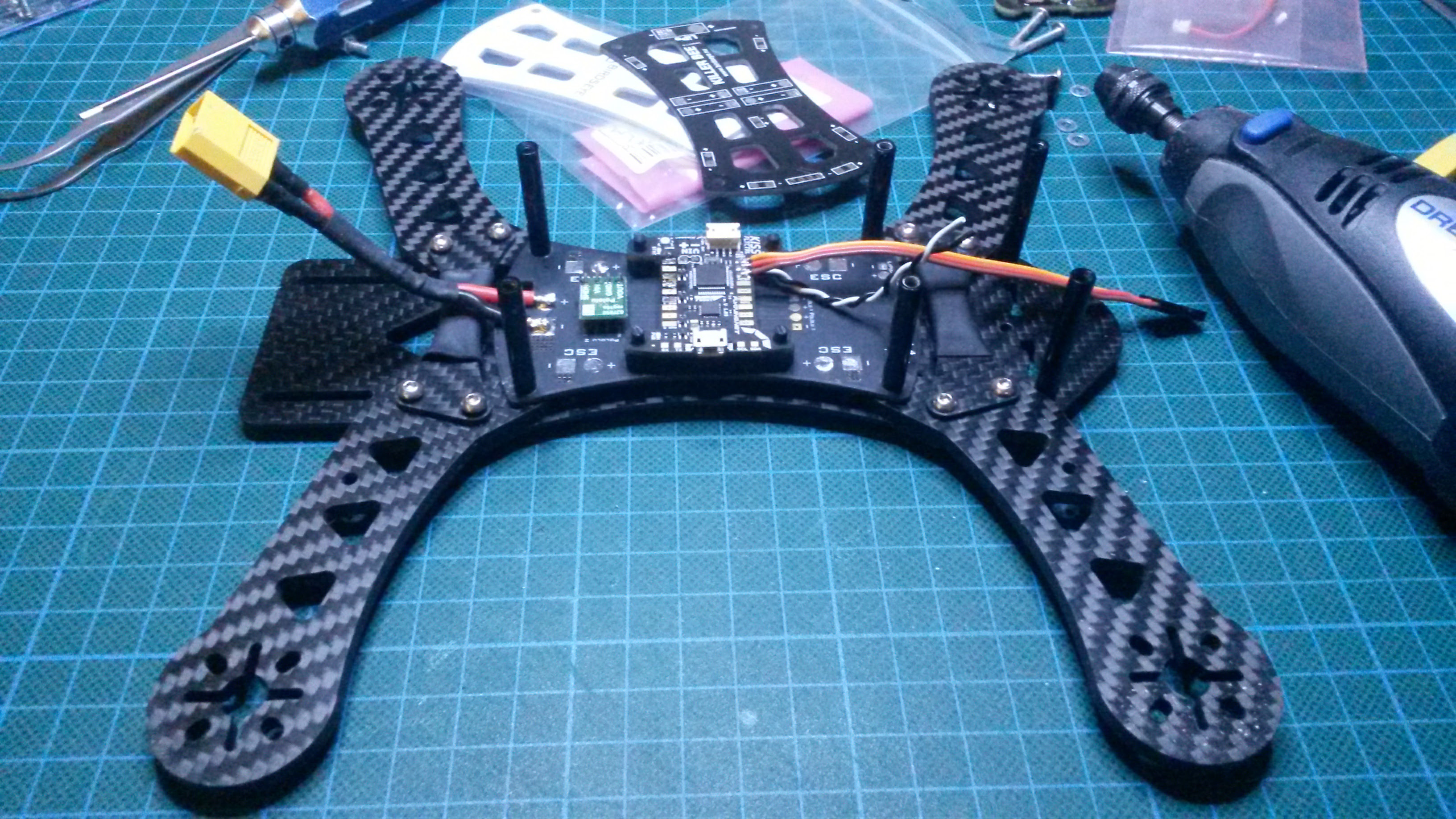
Kolfiberram
Till denna ram blev det ett PDB med plats för BEC och CC3D.

KillerBee PDB 2
Den BEC jag valde var en Pololu som lämnar 5 V (500mA) från 2S -8S LiPo

Pololu 5V, 500mA (2S-8S)
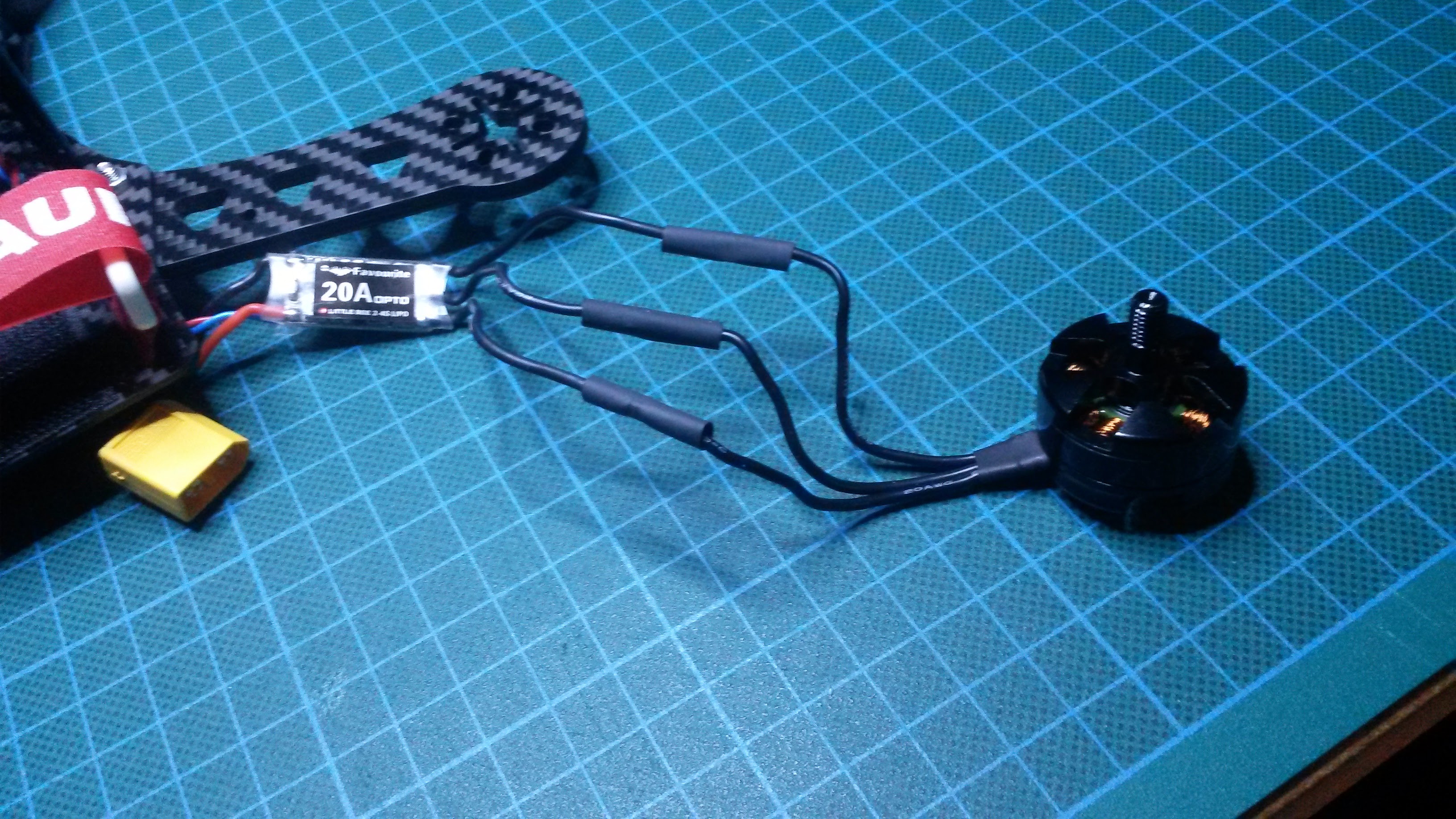
ESC blev Favourite 20A OPTO, det vill säga utan BEC
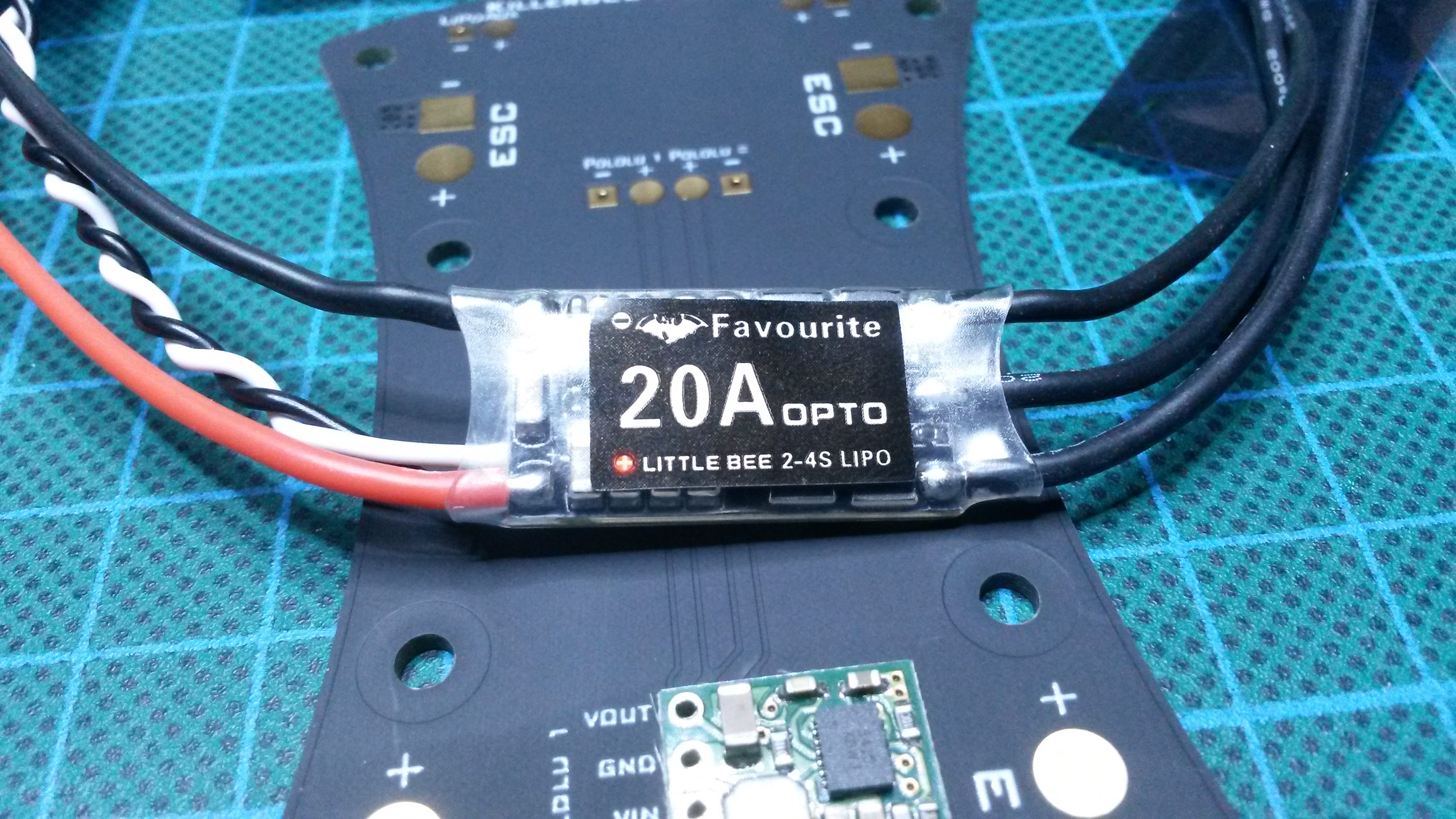
Favourite ESC med BLHeli Firmware (V14), 2-4S LiPo
Motorer blev 4 stycken EMax 2204/2300KV

EMax Copter MT2204 2300KV med CW och CCW-adapters
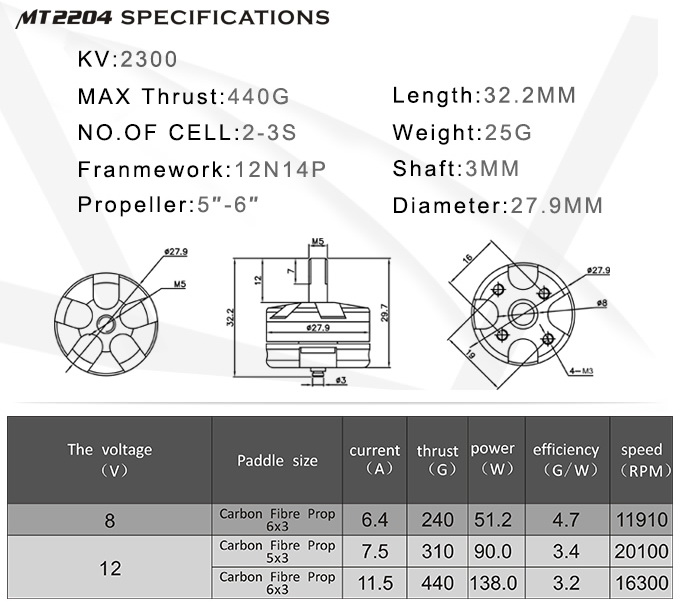
EMax Copter MT2204
Första monteringen gjorde jag med CC3D monterat inne i ramen med ”original” PDB men med denna montering skulle jag troligen inte få plats med FPV-prylarna och dessutom fick jag sätta batteriet på toppen.
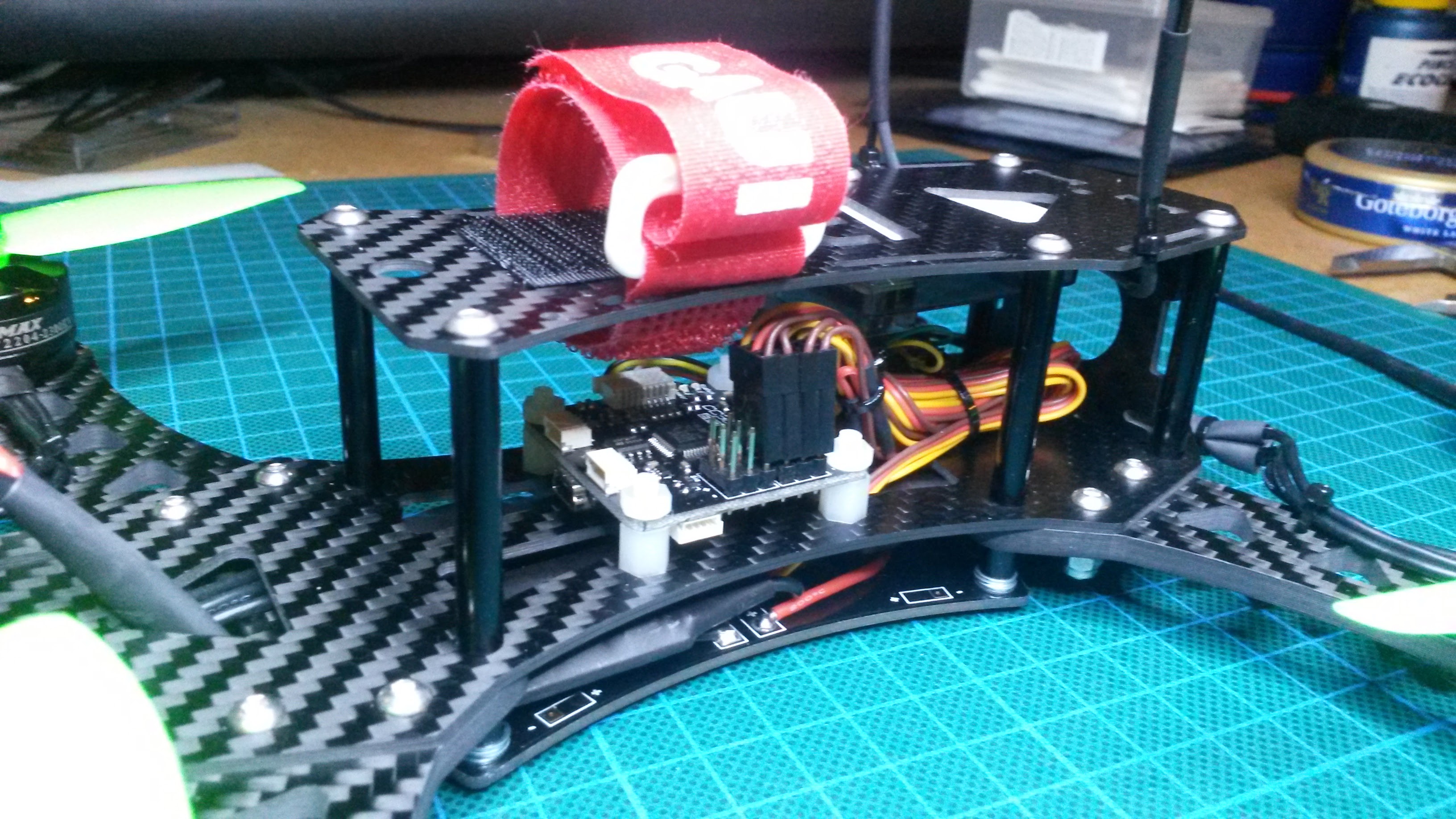
KillerBee första monteringen
Med CC3D monterat under ramen (på PDB) så blir det lite luftigare inne i ramen

CC3D monterad på PDB
När LiPo’n flyttades ner och med GoPro i fronten blev CoG prixsis på pricken

KillerBee COG prexsis med GoPro och LiPo
Det sista som skall göras är att kamma alla kablar till ESC. Originalkablarna var som vanligt på tok för långa men med lite lödande så tycker jag det blev riktigt bra.
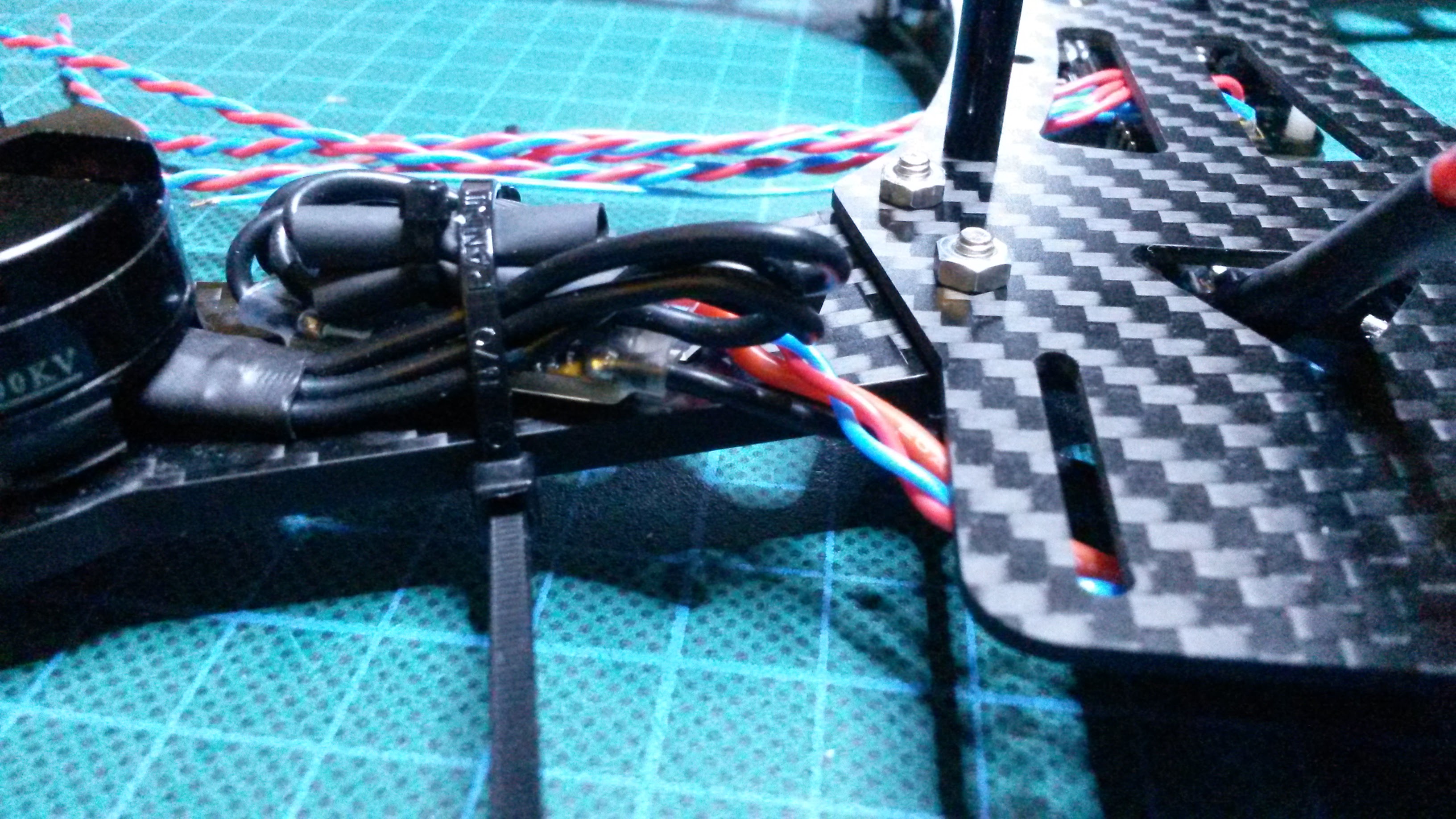
Så blev det med originalsladdarna
Originalsladdarna

Kapade kablar och rensade lödpaddar på ESC

Lödning klar

Krympslang på.

Nu é den kympt.

Montering klar
Nu skall jag bara göra om detta tre gånger till och vara noga med att kolla rotationsriktningen på motorn innan krympslangen krymps. Skull vara retligt att behöva öppna och göra om för att motorn roterar åt fel håll.
2015-11-21
Nu är allt på plats. Vtx och kamera är inte inkopplade men prylarna sitter på plats. Immersion Vtx är en stor blaffa så det kanske är dags att leta reda på något mindre. En kandidat kan vara AomWay från Hk.

Nästan färdig KillerBee. Allt är på plats
2015-11-22
Provflygning i Sandeklevshallen gav bara positiva vibbar. Allt fungerade och jag hade satt timern på sändaren till T1=4:30 minuter och T2=5:00 minuter. Kvar i batterierna var det cirka 40%. Jag borde således få upp mot 5 minuter ”riktig” flygning (så som jag flyger alltså ;-).
Nu är också video-prylarna monterade och maskinen slutade på 370 gram, utan batteri. Fick också till lite lutning på kameran 😉 Bara att stoppa in en tjockare pinne om jag behöver mer tilt. Var är flygvädret?

Luta kameran med en träpinne. Fullt justerbart 😉
2015-12-22
Försöker vara lite artistisk och fotografera min Bee med en konstnärlig touch.

KillerBee färdigbyggd
2016-02-29
Var ute och luftade maskinen i lördags och när jag drog på lite så hade quaden en tendens att tippa bakåt. Kollade CoG och den var cirka 1,5 cm för långt bak. Vill inte montera GoPro (ännu) så den uppenbara lösningen var att flytta upp batteriet ”en våning” och det innebar att VTx måste flyttas ner. Dessutom hade jag sabbat inställningen för justering av PID från sändaren. Med detta justerat så flög maskinen mycket bättre. Lärde mig också att PID-justeringen från sändaren bara gällde det som kallas Bank-1 i OpenPilot. Nu satte jag alla tre banker till 0,0025 (Roll+Pitch Rate.Kp) utan justeringsmöjlighet från sändaren. Nästa provflygning får avgöra om allt blev som förväntat.
Hoppas kunna göra en test på gräsmattan utanför huset för att se att allt är som det skall.
2016-03-19
Efter att flugit 9 accar i dag i strålande solsken och lite vind så ökar jag timer för flygtiden från 4:30 minuter till 5:00 minuter. När jag kollar accarna efter flygning är det > 35% kvar i alla och vissa är över 40%.
2016-03-27
Open Pilot har ju gått i graven och ersatt med Libre Pilot. Min KillerBee har jag tidigare konfigurerat med Open Pilot men nu känner jag att det är dags att köra Libre Pilot inför vårens och sommarens eskapader. Följande information är alla SW-versioner extraherade med Open Pilot innan jag startar Libre Pilot och laddar den nya maskinmjukvaran (firmware).
Data from file: KillerBee OpenPilot 2016-03-27, ”UAV-settings”
- Device information:
- Device ID: 401
- HW Revision: 2
- BL version: 4
- CPU Serial: 56ff6d067089575416521567
- Firmware Information:
- Firmware tag: RELEASE-14.06.01
- Firmware date: 20140826 19:21
- Git commit hash: e9799e6c
- Firmware CRC: 0
- GCS Information:
- GCS tag: RELEASE-14.06.01
- GCS date: 20140826 19:21
- GCS hash: e9799e6c
- GCS uavo: 3d873e3f
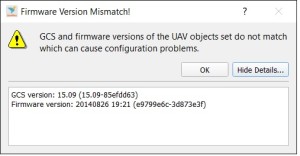
Warning when FW version not match
2016-04-04
Nu är det LibrePilot som gäller. Alla parametrar i CC3D är nu konfigurerade. Tre flygmoder (flight modes) är konfigurerade. Det är
- Attitude, stabilt flygläge för oss nybörjare
- Rattitude, stabilt läge med möjlighet att flippa och rolla
- Acro+, ett läge som enligt experterna (Anders i klubben) är bättre än rate.
Senaste testet gav som resultat att en roll gick på tok för långsam. Då var maximal rotationshastighet satt till 300 grader / sekund men nu är den parametern ökad till 450 grader / sekund. Det är samma värde jag använde när jag körde OpenPilot på men ZMR och även på Bee. I morgon skall jag prova. Lite jobbigt att inte ha någon dator jag kan ta med men lite längre fram på säsongen kanske Rune tar med sin ”nya” bärbara. Eventuellt kan vi kanske installera Libre Pilot på ”Sim-PC’n” i klubbstugan.
2016-04-05
Dagens test blev en besvikelse. Ingen fart i rollen. Troligen för att jag ändrade ”Max Rate Limit” som är en gräns (som namnet säger) och den gäller alla moder utom Acro+. Den parameter jag troligen skulle justera heter ”Rate Mode Response” som justerar ”How fast the craft rotates at full stick deflection”. Kommande dagarna är det skitväder så jag får ge mig till tåls innan nästa test.
2016-04-10
Nu jädrans. Fått till alla inställningar med LibrePilot och Bee’et flyger attans gott. Rotationshastigheten i Rattitude är lagom nu. Ökade till 650 grader per sekund 😉 Provade Acro+ för första gången och då blev Bee’et ett helt annat djur. Just nu är det lite problem med initieringen. Den verkar vara känslig för minsta lilla rörelse under initieringen vid spänningssättning. Varje start måste föregås av en provstart utan glasögon för att kolla att allt är OK innan glasögonen åker på. Resultatet än så länge är skadade propellrar med brottanvisningar inne vid hubben.

Skadade proppar
2016-05-13
Försöker gå vidare i min utveckling som ”quad-flygare” men tycker att Attitude inte räcker till och att Acro+ är lite för mycket så jag skall försöka följande. Förutsättningarna är att jag flyger alla flight-modes med Expo på 45% och Attitude med max 55 grader lutning.
- Sätta grader/sek i Acro+ (och Rate) till 400 grader/sek.
- Styra Expo med samma omkopplare som jag använder för att ändra flight-modes
- Använda Expo=45% i Attitude
- Använda Expo=60% i Acro+ (går ju att justera men börjar med 60%)
- Öka maximal lutning i Attitude från 55 grader till 70 grader
Får se hur detta verkar för jag vill ha lite lugnare quad runt ”center-stick” i Acro+ för att känna mig bekväm och dessutom får jag lite med rörlighet i Attitude
Fixar mina prylar 4S?
- Fatshark VTx = Power Requirements: 2s-6s LiPo (6v – 25v) –> JO
- Pololu BEC = 6v < Voltage < 36v (approx: 2S > 8S LiPo) –> JO
- ESC = Little Bee 2-4S, 20A opto –> JO
- Motorer = MT2204 2300KV, 2 – 3 celler, 7.5A med 5×3 prop, 11.5 med 6×3 prop. ????
2016-07-09
Får inte till egenskaperna med CC3D. I attitude fungerar maskinen bra. Den är följsam och mjuk men i Acro+ så får jag inte till det alls. Efter att provat KISS FC på min Bee-R så har jag nu slängt ut CC3D och stoppat in KISS FC. Behåller allt annat som tidigare förutom att jag stoppar in en S-Bus-mottagare.
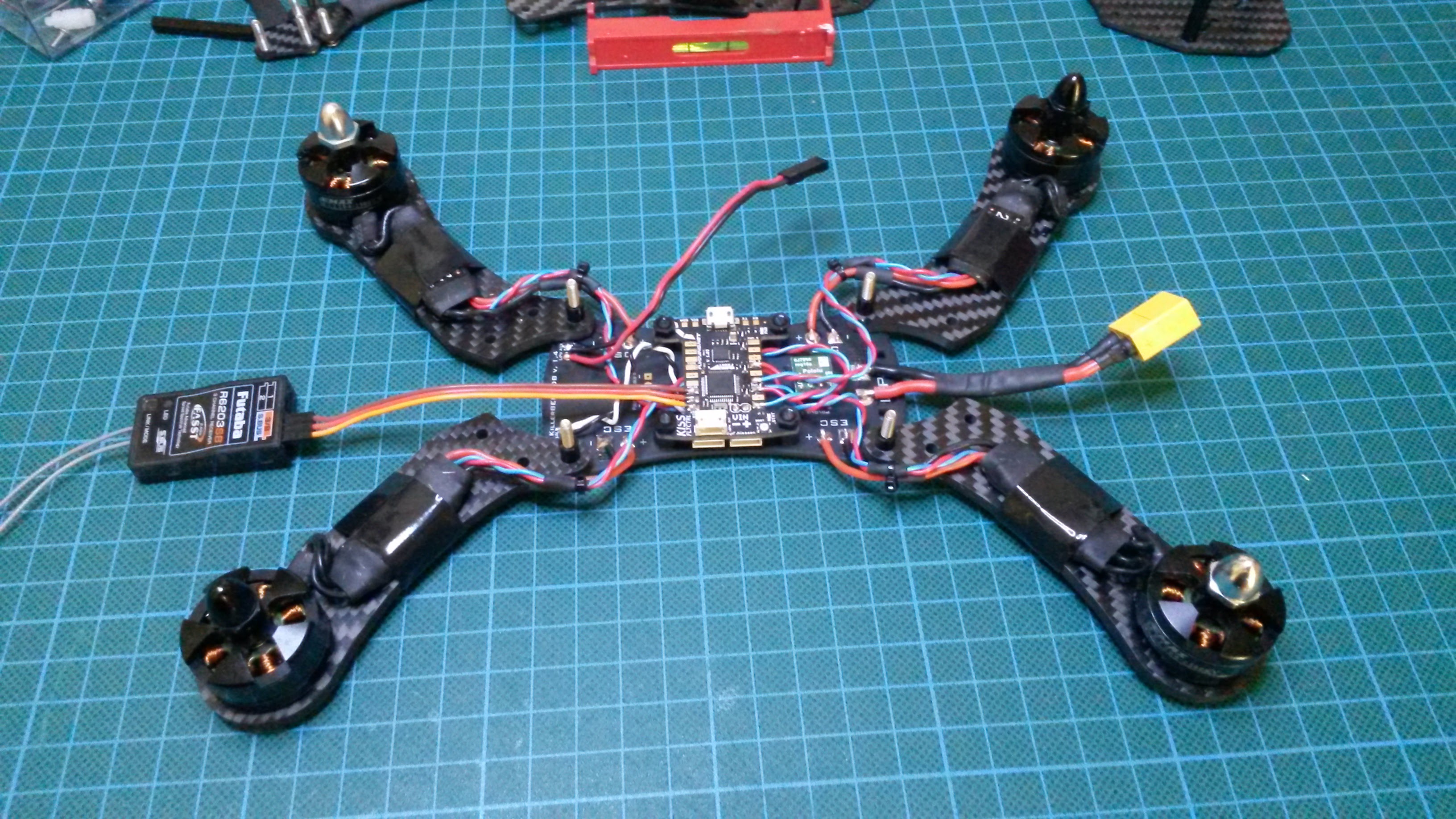
KillerBee med KISS FC och Futaba 6203SB
2016-07-10
Trotts skitvädret i Göteborg fann jag en lucka mellan regnskurarna att prova den ny-konfigurerade KillerBee. Jag kör den fortfarande på 3S så jag förväntade mig ingen raket men jag blev lite besviken. Jag har bara Acro konfigurerad och quaden var visserligen helt OK att flyga men det var klara tendenser till oscillation samt att vred sig i horisontalled när jag drog på trottel. Jag har alltså lite finjustering att göra men det var en sak jag hade glömt, eller inte fattat. Det finns ett protokoll som används för FC att prata med ESC och det heter OneShot. I KISS GUI finns det val för OneShot 125 (42). Mina ESC heter LittleBee 20A och dom skall klara detta protokoll så jag klickar den rutan inför nästa provtur. Troligen behöver jag kalibrera om mina ESC innan jag kan flyga.
Efter lite letande på webben så hittade jag klippet nedan. Det verkar som att det dom har gjort i ”OneShot” är att synkronisera FC’s kontrolloop med skrivning av data till ESC. Det är allt i princip. Får som sagt se om det har någon inverkan.
ESC LittleBee 20A – ”Oneshot125 is a different and faster communication protocol between the flight controller and the ESC on your quadcopter. It allows the FC to send control commands to the motor quicker, therefore in theory your multirotor should perform better.”
2016-07-17
Fick lite tid över och provade quaden och efter att justerat lite på I parametern (I som del av PID). Minskade från 0.035 till 0.025 och det var ett steg i rätt riktning.
Dessutom hade jag inte fattat hur man skulle kalibrera ESC med KISS FC. Man skulle sätta max Trottel i KISS GUI till 2000 och inte röra trottel på sin radio. Så efter lite pillande/provande tror jag att mina ESC är kalibrerade. Det som inte är helt OK är att man inte kan sätta trottel till 0 (noll) i FS. Hur jag än försöker så går varvtalet ner till tomgång och inget annat när jag stänger av radion. Quaden lär inte flyga men motorerna kommer alltså gå i ”tomgång”.
2017-01-29
Nu har till sist fått tummen ur och beställt lite uppdateringar så att jag kan köra 4S. Motorerna jag hade sedan tidigare identifierat att dom behövde bytas ut och eftersom jag har KISS FC beslutade jag att byta ut till KISS 24A ESC också.
Emax RS2205-2300
- Framework: 12N14P
- No. of Cells: 3 – 4S
- Length: 31.7mm
- Shaft: M5
- KV: 2300
- Max Thrust: 1024g
- Diameter: 27.9mm
- Weight: 30g
Så nu skall quaden upp på byggbordet och uppdateras inför kommande utomhussäsong. Detta får troligen bli en LOS-quad. Det vill säga helt utan FPV. Bara för att lek.

KillerBeeUpGrade
Start rebuilding of Killer Bee
2017-03-06
Nu é denna quads KISS-FC uppdaterad från V1.01 till 1.02RC28. Mjukvaran för att ladda FW heter STSW-STM32080 och FW finns på FlyDuino.
Manualen för hur man gör för att uppdatera KISS FC finns på denna länk.