
7DJI kom först och nu byggs det för fullt. Den kommande veckan verkar ge en del byggväder (regn) så det borde inte dröja allt för länge innan vi är ”up and running”.
Hjälp att komma igång finns på följande Wiki men dom finns också på FaceBook.
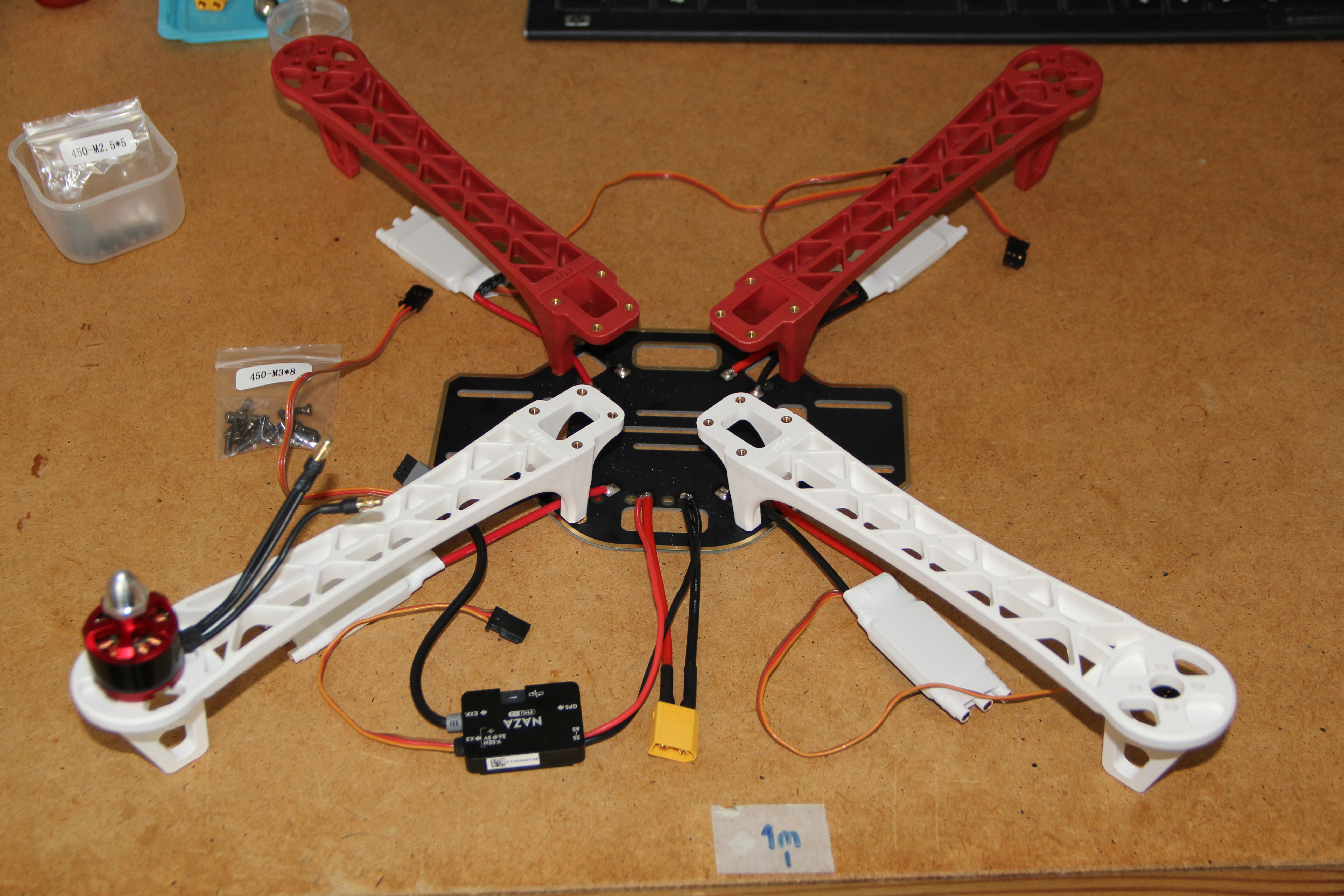
Bottenplattan med all strömförsörjning är klar. Montering av armarna med sina motorer påbörjad.
Efter att ha monterat de undre armarna så monterade jag all elektronik (förutom GPS). Sedan var det dags att koppla upp sig mot PC’n för att göra grundläggande inställningar och det visade sig att var lite firm-ware uppdateringar oxå.

Allt fungerade förutom att jag inte kunde välja mellan de tre olika flygmoderna.
- Manuell
- Attitude
- GPS
Det som fungerade var Attitude. Efter lite letande bland menyerna i NAZA-M V-2 mjukvaran insåg jag att man var tvungen att justera Endpoint i sändaren för den switch som används för att välja de olika moderna. Med Endpoint satt till 80% isf 135% som Futaba har som default så fungerar det. Med Quaden på balkongen så indikerar den att det finns 5 satelliter ”synliga”.
Nu får jag avsluta inställningarna och montera det sista. Fästa upp alla kablar, mottagare, GPS-antenn och LiPo. Sedan skall jag balansera propparna. Först efter detta så blir det provflygning

Nuvarande konfigurering (2013-09-15)
2013-09-19
Nu är den färdig för provflygning.

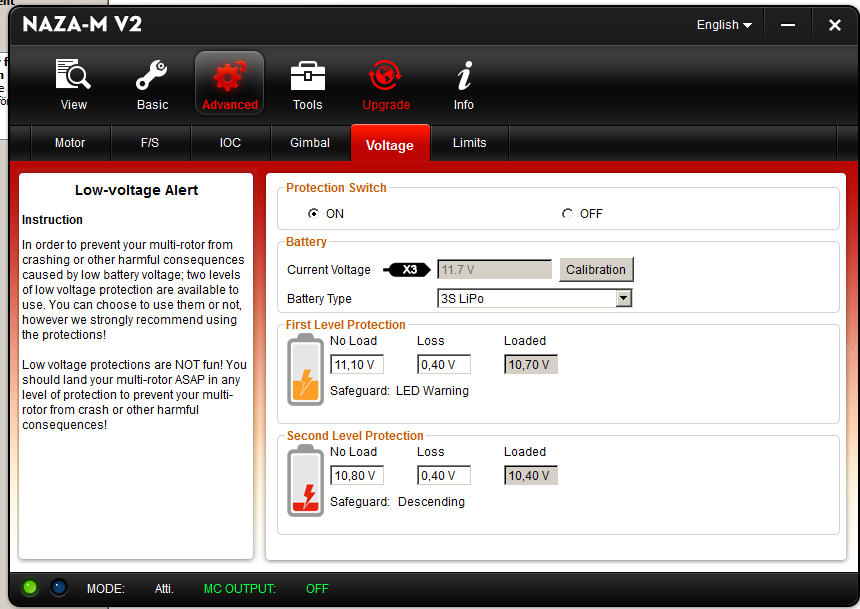
- First level protection : 11,10V
- Second level protection : 10,8 V
- Loss : 0,4 V
- Pitch : 110%
- Roll : 110%
- Yaw : 100%
- Vertical : 100%
- Pitch : 125%
- Roll : 125%
Nu har jag provat lite hovrande och stilla manövrering med mina 3S 2200mAh accar och jag fick mellan 6 och sju minuter med cirka 30% kvar. Detta var med accarna laddade till 95%. Flygningen avslutades omedelbart efter att ”First Level Protecktion” löst ut och då är den satt till 11.0V. Nästa steg är att få till ”Second Level Protection” men jag får ta det lite varligt där för jag vill inte köra accen i botten.
Ytterligare tester. I dag skulle jag prova det som manualen kallar IOC (Intelligent Orientation Control) och de två moder som IOC erbjuder.
- Course Lock – Quadens styrning alltid är ”vinkelrät” mot startpositionen oavsett vart nosen pekar
- Home Lock – Hem är alltid högerspaken åt dig oavsett vart nosen pekar
Båda moderna fungerade men det känns ganska ovant att manövrera i dessa moder. ”Home Lock” kan nog komma till användning när quaden är några hundra meter bort och man inte riktigt kan se hur den är orienterad i luften.
Jag hängde också på en enkel Key Cam och när jag kikade på filmen så inser jag att det krävs en del arbete med att balansera propellrarna. Det var rejäla vibrationer. Balanserare är beställd. En oediterad filmsnutt finns på tuben. Första 1:30 är bara väntan på att GPS’en skall hitta sina satelliter och vid 6:40 får Rune fnatt 😉
2013-10-01
Lite problem med stabiliteten. Inte så att den är lurig att köra utan den påverkas lite för mycket av vinden tycker jag. Den gungar till i mellan åt. Vet inte vad detta kan bero på men en sak som jag hittat på webben är att GPS-antennens placering skall anges som konstanter i förhållande till CG. Min sitter på standard ”pinne” och jag har satt höjden (Z-axeln) till -10 cm men de flesta som jag hittat har den till -9 cm så detta skall jag prova härnäst.
Sedan är det dags att prova fail safe. Det vill säga kom hem och landa automatiskt om jag tappar radiokontakten. Återkommer med mer om detta.
2013-10-02
OK det ser ut som jag får återvända till ritbordet. Köpte en uppsättning av ”långa” landningsställ i dag och när jag skall montera dom tänkte jag att jag skulle möblera om lite på ramen.
- Placera GPS-antennen i centrum på toppen
- Placera batteriet på undersidan av quaden för att sänka tyngdpunkten.
- Vrida botten-delen av centrumdelen på kroppen för att i framtiden kunna montera kameran enklare
Hoppas att det kommer att regna de närmaste dagarna så att operationen går snabbt 😉
Dagens flygning med justeringarna på gain gav inga direkta svar till varför quaden vaggar till emellanåt. Vid 18-tiden var det dock helt vindstilla och då var maskinen helt lugn så problemet ser inte ut att orsakas av maskinen och dess komponenter utan det är snarare så att reglersystemet inte riktigt kan kompensera för yttre påverkan (kastvindar och liknande).
2013-10-03
Nu har jag fått på de långa benen och bottenplattan är vriden 90 grader så att jag kan montera batteriet under ramen och förhoppningsvis kunna montera en framtida kamera.

2013-10-13
Kopplade in ”Gain Adjust” på en ledig kanal på sändaren och gav mig ut för att kolla den nya konfigureringen. Tror mig hittat att 150% på det som kallas ”Basic Gain” är lagom. Låter ”Atti Gain” vara kvar på 100% än så länge. Med denna inställning var ryckningarna i Quaden inte lika tydliga.
2013-10-15
DJI NAZA V2 har två ”Gains”
- Basic
- Attitude
Om jag fattar detta rätt så är ”Basic” den gain som bestämmer hur stabil quaden är när man bara låter den stå och hovra. ”Attitude” bestämmer hur kvickt den skall svara på input när man spakar. Just nu har jag bara justerat ”Basic” och det kanske behövs lite ”Attitude” justeringar också. Det kommer säkert när jag blir lite mer erfaren på quaden.
Nu har jag också mixat in en tvåläges-switch för att koppa in ”Falisafe” utan att stänga av sändaren och, om GPS är tillgänglig, göra att quaden skall komma hem och landa. Skall bli spännande att prova.
2013-11-06
Det blev en GoPro Hero3+ Black Edition. Den är tillfälligt monterad på Quaden så nu väntar jag bara på flygväder.

2013-11-10
Inte helt ”optimalt” väder. Lite småkyligt med 5 grader och cirka 5 m/s byig vind. Kameran monterad direkt i ramen på Quaden men det var förvånansvärt lite vibrationer. Lite störande att Quaden ”vinglar”. Lösningen är kanske att göra lite justeringar på ”gainet”.
2013-11-11
Jag har hittat en sida där folk plitar ner sina konfigurationer map vikt, gain, motorer….. och när jag sorterar på min konfiguration ser jag att jag kommit fram till en ”gain-setitng” som är ganska lik på det som kallas ”Basic Gain” men jag har högre ”Attitude Gain”. Skall ta och sätta upp Attitude gain så att jag kan justera med trim på sändaren och prova med lite lägre värden och se om jag får en stabilare Quad.
En annan sak jag ser är att de som har Graupner propellrar har högre Basic gain än de som har original.
2013-12-27
Nu har jag beställt en gimbal. Det blev en Tarot T-2G och jag beställde den från Helipal. Första gången jag beställer från denna firma. Dom ”lovar” leverans på 4-6 dagar så der finns en möjlighet att min gimbal kommer redan nästa vecka och då blir det montering och sedan hoppas vi på att det skall sluta regna.
2013-12-28
Det verkar som att en del ”där ute” har haft problem med att koppla in sin Tarot T-2D. Tilt eller Tilt-Roll skall tydligen kopplas på detta sätt till mottagaren. Jag kommer bara att köra med Tilt (bara en kanal ledig på min mottagare). Mer information finns på RCGroups.com.

2014-01-03
Nu har jag fått min Tarot gimbal från HeliPal och efter lite ”monterande” så provade jag den. Alla inställningar är standard. Lite strul med att ansluta saändaren för kontakterna var inte ”rätt kopplade”. Dessutom skall jag fundera ut hur jag skall montera den på quaden. Totalvikten med de 3S cellerna jag har
- Flight=2200mAh
- Gimbal=1300mAh) så väger maskinen in på
- Vikt= 1490 gram.
Det ger 110 gram till vad DJI rekommenderar som max flygvikt på 1600 gram.
För att gå vidare och avsluta mitt ”filmprojekt” så att jag kan filma och ha koll på fakosten med FPV behövs en kabel som inte var med vid leveransen av min gimbal. Nu tror jag att jag hittat en på RcFlight.se. Det finns två anslutningar på denna kabel och den ena är för video/audio och den andra är för spänningsmatning till kameran.
- Röd / Svart är till strömförsörjning av kameran
- Orange / Svart är videosignal ut från kameran
Vill man bygga egen kabel finns det en beskrivning på RcExplorer. Resistorn (100kOhm) mellan pin 7 och jord som behövs för att kameran skall sända ut videosignalen verkar var med på kabeln ovan. Nu får vi se när jag köper en Tx / Rx och monitor.

2014-01-12
Så var premiären med min T-2D avklarad. Jag gjorde inga ändringar i inställningarna (allt default) annat än ett par ändlägen. Nu skall det bli spännande att prova quaden ute och se vad man får för bilder och hus stabilt det blir med lite blåsigare förhållande. Inomhus kan jag inte se att det är några konstigheter alls. Jag är helnöjd med detta resultat. Efter 5:30 i luften hade jag 30% kvar av mina 2200mAh. Det kommer snart en uppdatering med 4000mAh LiPo och detta tillsammans med ett lite mindre batteri till gimbal’en ger en viktökning med cirka 60 gram. Nu väger den in på 1490 g så jag kommer att landa på 1550 g. Motorerna var uppe i 45 grader efter 5:30 minuter så det bör inte vara några problem där.
2014-01-21
Ny mjukvara. Nja, ny, den kom tydligen i oktober. Enligt ”release notes” skall den nya mjukvaran ”Optimize the Flight limits function”. Undrar om detta kommer att märkas.
Manualen säger också ”Make sure to reconfigure all parameters and recalibrate the Transmitter in the assistant software after upgrading the firmware, since the upgrade will reset all parameters” så jag får komma ihåg att kalibrera de relevanta parametrarna.
2014-01-22
Kalibrering av kompass skall initieras av att man kopplar mellan ”Manual” och ”GPS” mod. Jag har valt att konfigurera min tre-lägesomkopplare till att vara ”Attitude”, ”Attitude” och ”GPS” så jag trodde att man var tvungen att konfigurera om detta för att kunna kalibrera kompassen. Men detta visar sig vara fel 🙂 Det fungerar att koppla mellan mina tre lägen 6-10 gånger för att komma in i kalibreringsmode. Bra för då slipper jag att av misstag koppla om till ”Manual” och kan ha ”Attitude” som default.
2014-03-13
FPV-prylarna fungerar fint. Båda Fat Shark kameran (700TVL CCD PAL Camera) och GoPro’n fungerar fint med min Tx/Rx/Monitor. Jag är dock lite fundersam rörande videokabeln från GoPro till sändaren. Det känns som det finns en risk att den hindrar min gimbal från att röra sig fritt. Tror att jag kommer att köra lite FPV med Fat Shark-kameran och samtidigt passar på att känna efter hur det fungerar att köra FPV med skärm. Med GPS på Quaden är det ganska säkert och skulle olyckan vara framme under min inlärning så kvaddar jag inte GoPron’n.
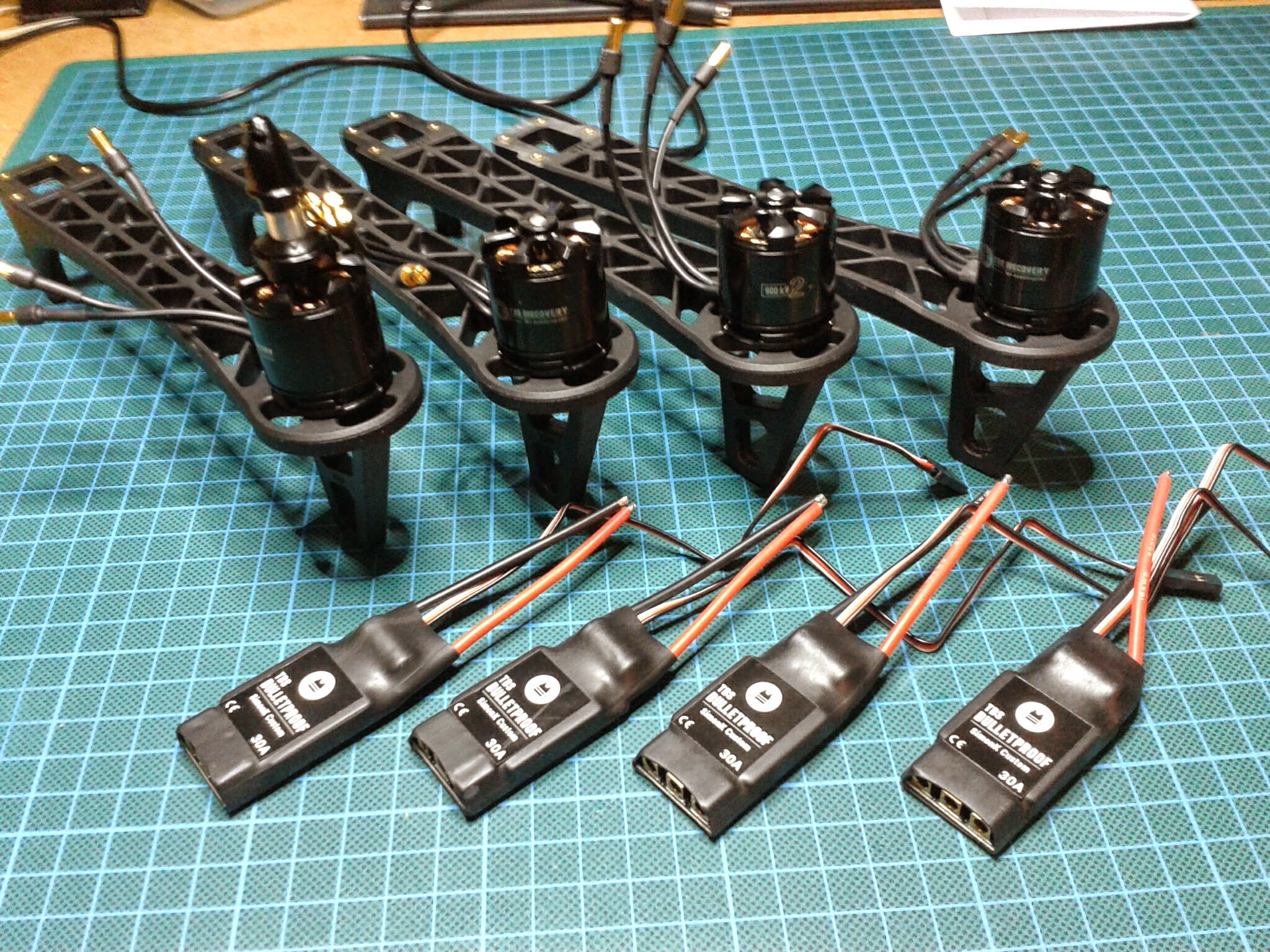
2014-10-06
På byggbordet ligger just nu fyra stycken motorer med tillhörande ESC. Det blev TBS-original. Operationen att byta verkar inte vara speciellt komplicerad men jag vill ha lite nya skruvar och dom kommer först till helgen (hoppas jag). Monterar också nya svarta armar. Det överblivna (DJI-originalprylar) blir en bra grund till en Quad för att prova lite olika kontrollerkort. KK2, CC3d, Evolution …. det finns många att välja på men det skall vara något med ”massa parametrar” att justera så att man har nått att göra regniga vinterkvällar.
2015-12-04
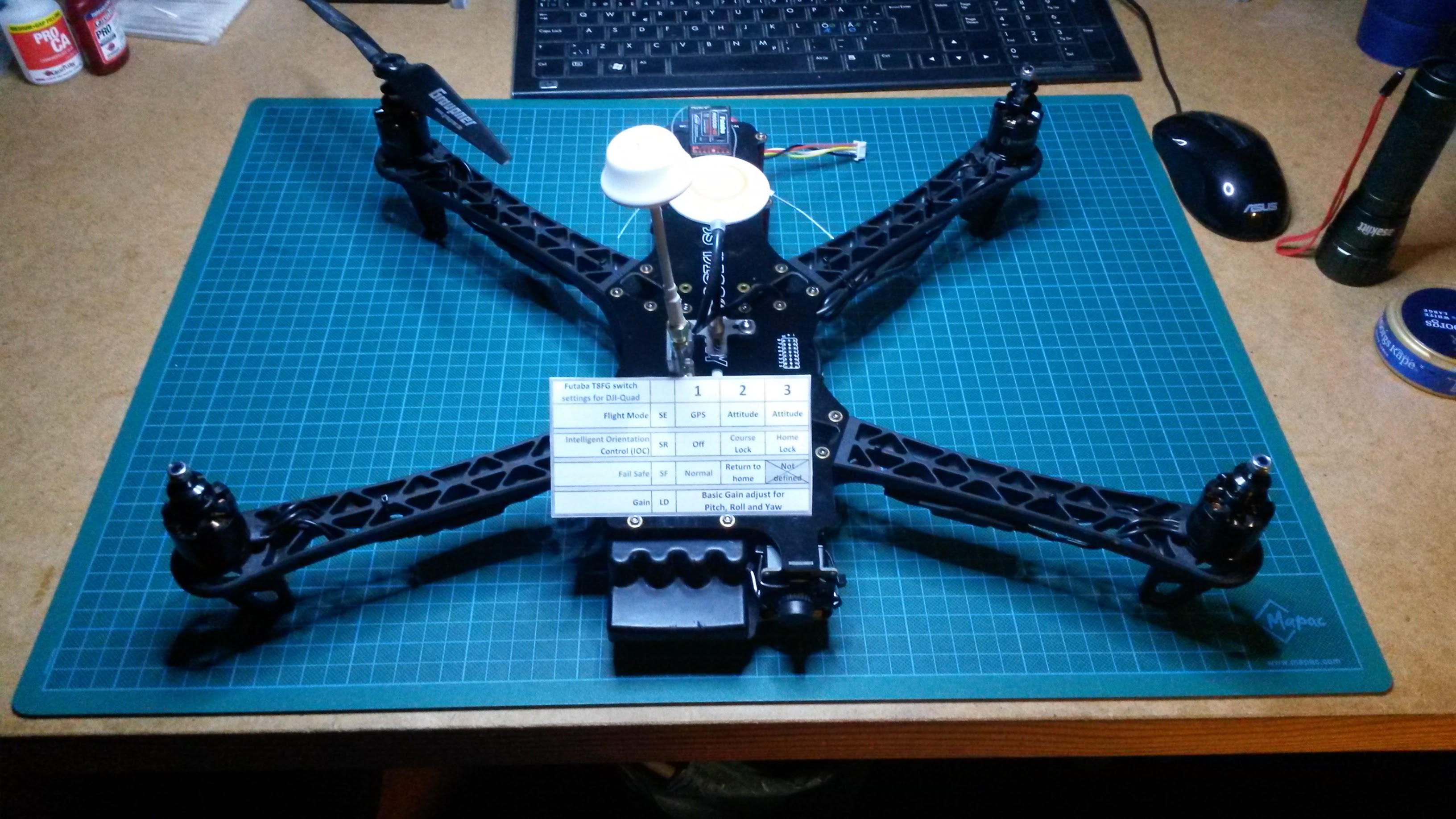
Quaden har stått i garderoben i stort sett hela säsongen för det har varit fokus på FPV med min ZMR250 och till viss del på grund av skitväder. När jag kikar på den så inser jag att det är svårt att komma ihåg hur alla brytare skall stå för att allt skall fungera som jag vill. Man kan välja mellan GPS eller Attitude med en brytare. En andra brytare väljer det som DJI kallar IOC (Intelligent Orientation Control) och den sista är ”Fail Safe” med ”Return to home”. Taskigt om man tror att man har GPS och behöver ”Fail Safe” och quaden inte kommer hem. Så bilden nedan är en sammanställning av hur jag har konfigurerat min Futaba T8FG. Dessutom behövdes det en ominstallation av drivrutinen för NazaM för att få kontakt med quaden.
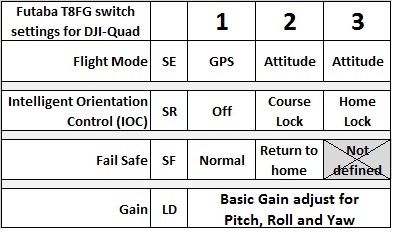
Switch-funktioner på min Futaba T8FG för att kontrollera DJI-quaden
Nu skall jag försöka montera Vtx lite ”snyggare”. Just nu sitter den på ett ”original fäste” och det ser inte riktigt OK ut tycker jag.
TBS Black Sheep justering
2016-07-25
Quaden har stått på hyllan ett tag men nu var det dags att ta ner den och flyga lite. Men ….. 🙁
Jag har numera uppdaterat alla datorer till Win10 och då fungerar inte konfigurationsprogrammet. Eller snarare att drivrutinen för USB fungerar inte. Efter lite letande på nätet så visade det sig att DJI inte har ”signerat” sin drivrutin. Så för att få igång apparaten gjorde jag som följande klipp beskriver. Man skall stänga av Win10’s kontroll över vilka drivrutiner som man skall installera. Efter denna manöver ser det ut att fungera igen.
2017-08-13
Fick en fråga från en polare i klubben (AKMG) om varför han inte kunde komma i kontakt med quaden från ”Assistant Software”. Kikade på min, som inte är flugen i år, och kunde konstatera att jag inte får kontakt heller. Kikade lite på webben innan jag insåg att detta känner jag igen. Gjorde som Youtube-klipper ovan föreslår och det löste mina problem. Konstigt att inte DJI kan ”registrera” sina drivrutiner så man kan sköta uppdatering på ett smidigt sätt.
Just nu kör jag ”Assistant Software” 2.20 eller 2.40 men efter att sett vad de nya versionerna på FW (v4.04 och v4.06) orsakar så behåller jag FW 4.02