
LibrePilot isf OpenPilot
OpenPilot Wiki archive
Open Pilot The Next Generation Open Source UAV Autopilot
2015-12-20
Efter flera försök att konfigurera ett CC3D kort med en Futaba S-Busmottagare beslutade jag mig för att prova ”efterföljaren” till OpenPilot. Nu är det LibrePilot som gäller. Ett försök så var jag igång 😉 Det finns också ett antal ”standardinställningar” och jag får se om det blir en ZMR250 eller en DJI450 som blir första försökskaninen.

S-Bus och CC3D
2015-11-21
Något har hänt med tidigare Wiki. Tydligen något med taskig finansiering så alla mina gamla länkar har slutat fungera. Nu när jag behövde informationen så fick jag leta reda på informationen, därav denna notering. Länkarna ovan har jag också uppdaterat
2015-11-29
Som jag tidigare har konstaterat så verkar det vara ”si-och-så” med dokumentationen så därför har jag lagt till följande länkar för att lättare hitta tillbaka (om dom inte stänger av dessa också). Notera att 15.02.02 verkar vara den sista versionen som stödjer CC3D. I skrivandets stund (2015-11-29) har jag RELEASE 14.06.01
- RELEASE – OP-15.02.02 – Revo, CC3D, Atom, CC and v9 GPS
- Installing or Updating Your Firmware
- CopterControl / CC3D / Atom Hardware Setup
- ”Uninstall previous version first, then use your system package installer to install.”
- ”You should check the bootloader version of any CC or CC3D and know the Bootloader version. If not already on Version 4, you MUST upgrade your Bootloader via the documentation linked below before using any firmware from 13.xx and newer. For directions on checking bootloader version and installation instructions, please see theBootloader Update page.”
- ”Please ensure you download the correct v4 Bootloader. CC, CC3D/Atom, OPLink and Revo all use different bootloader files!”
Detta är en kopia av ”manualen” för uppdatering av GCS på OpenPilot/LibrePilot Wiki
The firmware for your OP boards is packaged within the GCS download. To update the firmware on the various OpenPilot boards follow these steps:
- Uninstall any previous versions of OpenPilot GCS
- Install the latest OpenPilot GCS version (available from the previous page of this Wiki, the Downloading and Installing the Ground Control Station page)
- Read through the informational documentation for CC/CC3D and/or Revolution page by using the links at the bottom of this page.
- Once familiar with your board’s functions, find the Welcome tab of the GCS and with your board plugged in, proceed through the Vehicle Setup Wizard for Multirotor or Fixed Wing.
For vehicles other than Multirotor or Fixed Wing, or to install firmware manually (without the wizard) you must take the following steps to ensure that your firmware is updated correctly:
- Uninstall any previous versions of OpenPilot GCS
- Install the latest OpenPilot GCS version (available from the previous page of this Wiki, the Downloading and Installing the Ground Control Station page)
- Open the OpenPilot GCS and go to the Firmware Tab
- With the board unplugged, click the Rescue button
- Connect the board
- (There’s a chance that the new drivers might not finish installing before the timer runs out. If this happens, wait until the drivers finish their install, then unplug the board, click Rescue again, connect the board and continue)
- and click the Erase Settings button.
- Wait approximately 30 seconds
- Click the Upgrade & Erase button and follow the on-screen instructions
- Firmware install/update complete.
Jag har provat ett ”originalkort” och ett ”piratkort” av CC3D och slutresultatet är identiskt men själva uppstarten av korten. Kortet från OpenPilot satte jag på min gamla ram från DJI med deras ESC och motorer. Det är en F450. Det andra kortet från iFlight satte jag på en Kinakopia på en MiniQuad med typbeteckningen ZMR250.
Som sagt så är slutresultatet, hur quaden flyger, är identiskt men vägen dit var inte lika enkel med iFligh-kortet. Det var konfigureringen och ”uppdateringen” av ”firm ware” som var lite nervpirrande. OpenPilot-kortet var bara att plugga in och sedan fungerade allt. iFlight CC3D däremot var problematiskt med problem att läsa version på FW och HW. Det var svårt (tog många försök) och jag kan inte peka på vad det var som jag gjorde att det till slut fungerade men men OpenSource-CC3D fungerade det klockrent första gången. Skillnaden i pris var nästan 400 SEK (OpenSource cirka 700:- och iFlight cirka 300:-). Visst är det roligare med två fungerande kort för 300:- per styck men hade jag varit ”blåbär” så hade jag nog skickat skiten till tippen.
Slutsats: köp original 😉
Status 2014-12-05
- Device ID: 402
- HW Version: 2
- Boot Loader version: 4
- CPU Serial: 57ff7b065078555047391087
- Firmware tag: RELEASE-14.06.01
- Firmware date: 2014-08-26 19:21
- Git commit hash: e9799e6c
- Device ID: 402
- HW Version: 2
- Boot Loader version: 4
- CPU Serial: 55ff6c065083495753221987
- Firmware tag: RELEASE-14.06.01
- Firmware date: 2014-08-29 19:21
- Git commit hash: e9799e6c
På båda mina kort har jag konfigurerat min Futaba T8FG att på potentiometer RD (Right Dial) kunna justera PID-parametrar. Jag hittade denna ”manula´” på Tuben. På min F450 har jag kommit fram till att 0,0036 ger en stabil maskin. Motsvarande på 250-maskinen blev 0,0042. 250-maskinen har jag bara kört ute i cirka 6 m/s så jag kommer nog att justera det uppåt lite vi lugnare vindar.
2015-07-09
Det går sakta framåt men nu börjar det likna något.
2015-10-30
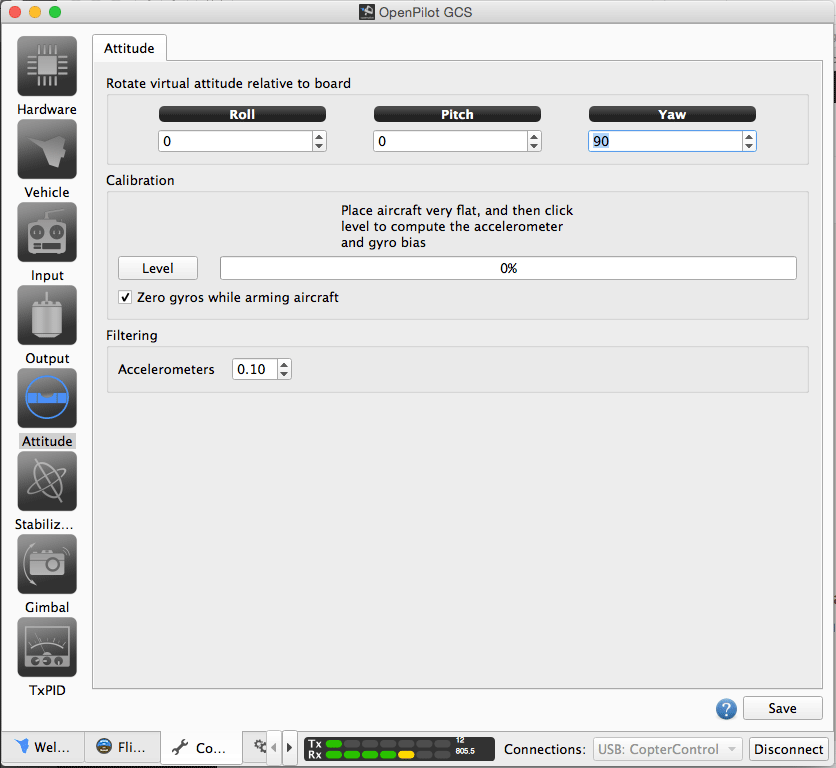
Nu håller jag på att bestycka min KillerBee från BirdsEye och med deras PDB som erbjuder fästpunkter för CC3D så måste jag vrida kontrollerkortet 90 grader för att kunna montera kortet. OpenPilot GCS har möjlighet att sätta Attitude så att man kan montera kortet lite hur man vill. Vad man gör är att sätta en off-set på någon eller flera av Roll, Pitch eller Yaw. Det jag behöver är att justera Yaw. Tabellen nedan visar värden för dessa parametrar beroende på placering av kortet

Efter det att man monterat kortet så skall gå till Attitude-fliken i GCS och mata in de parametrar som behöver uppdateras beroende på placeringen av CC3D. Glöm inte att spara inställningarna till kortet. I mitt fall har jag pilen till höger men (USB-kontakten till vänster) så jag använde -90 grader för Yaw men bilden nedan visar 90 grader och det innebär pilen till vänster (USB-kontakten till höger)
VIKTIGT: Dessa parametrar måste uppdateras om man har gjort
- Uppdatering av kortet
- Reset på kortet
- Kört kalibreringshjälpen
Ursprung: Jag hittade denna information på denna länk
http://blog.sam-thompson.info/how-to-change-the-orientation-of-your-cc3d-flight-controller/
2015-11-24: Städade bland gamla papper och hittade plotten på KP-adjustment som jag har på en potentiometer på min 8FG Futaba-sändare, KP-gain adjustment
Mina inställningar: ZMR250 och KillerBee UAV-filer för CC3D
2016-04-02
Första försöket med LibrePilot i verkliga livet fungerade så där. Exporterade OpenPilot till fil som jag sedan importerade med LibrePilot till min KillerBee. Attitude mode fungerade OK men Rattitude var ganska värdelös. Hispig maskin och i princip o-flygbar. Nu har jag konfigurerat quaden helt i LibrePilot men jag har ännu inte hunnit provflyga. Däremot har jag insett att det finns en mode som heter Acro+ som skall ersätta Rate för små quads. Dessutom vet jag nu hur man skall justera PID för alla ”flight-modes” från sändaren. Tidigare har jag konfigurerat fligt-modes i olika ”Banks” men man kan konfigurera i samma ”Bank” så att Tx-PID-Adjustment kan ske för alla tre moder. Ytterligare information skall jag försöka smälta, till exempel det som finns i denna video.
2016-06-02
Clean Flight – How to flash onto CC3D
Är CleanFlight något som kanske är enklare att ”justera”? Jag har ett CC3D kort över så det skadar inte att åtminstone prova på att ”flasha” och se hur interfacet ser ut.
Värt att noter är att från och med V1.11.0 så kan man inte använde OpenPilot bootloader för att ladda CleanFlight (NOTE: Openpilot bootloader support as been removed. Flashing CC3D’s via GCS is no-longer supported. See docs.)
Så det är alltså V1.10.0 som gäller om man vill använda OpenPilot men jag antar att samma gäller för LibrePilot. Får se om jag provar detta någon dag.
- GitHub.com är platsen att hämta CleanFligth_CC3D.bin
- GUI hämtar man som en insticksmodul till Crome
- CleanFlight.com är huvudsidan.
Rotor Riot ger in ”KISS FC Tutorial”