
130Detta är en Bat Bone Tri 370 Kit: Flite Test Store.

Detta blir min första multirotor (eller inte), en tri-kopter som man kan fälla ihop.
Nu gäller det bara att bestycka den med KK, ESC, motorer och ett servo. Den flyger på 3S-2200mAh och det finns plats för en kamera men om det blir FPV vet jag inte. Flygfärdig kostar den 1900SEK. Bara ramen kostar cirka 850SEK inklusife frakt från Flit Test.
Jag har stoppat i ett HK KK2.0 Multi-rotor LCD Flight Control Board med tre stycken Park300 motorer.
KK-kortet skall ha ”Roll &Pitch gain linked” med kanaler enligt följande:
- AIL: Skev……….1
- ELE: Höjd………2
- THR: Trottel……3
- RUD: Roder……4
- AUX: Stab……….5
2013-09-19
Nu har det första paketet kommit och vinnaren var HK Europa. Nu väntar jag på HK Kina och Flitetest USA. Det som kom var följande
Det som återstår är
- TGY-375DMG Metal gear Digital Servo
- Turnigy Park300 Brushless Outrunner 1380kv
- 8045 SF Props 2pc Standard Rotation / RH Rotation
Detta skall vara på väg men jag hittar ingen status om var paketet är. Enligt mail från HK skall dom ha skickat förra veckan. Det fungerar inte bättre från USA. Paketet är i Chicago med status ”PROCESSED THROUGH USPS SORT FACILITY” men det var 11:e september 🙁
2013-09-20
Det låg en avi i brevlådan i dag. Paket finns att hämta på ICA. Är det HK Kina eller Flitetest? Det återstår att se.
2013-09-21
Paketet var från HK så nu är det bara Flitetest-paketet som saknas.

2013-09-21
Nu skall jag skaffa mig möjlighet att ”flasha” mitt KK2.0 kontrollerkort. Det ser ut som att jag behöver en sladd 😉 och lite mjukvara.
Att uppdatera firmware på till exempel ett KK2.0 borde inte vara några problem. Det som behövs är en programmerare och det brukar vara någon form av USB-moj. Sedan skall man ha drivrutin för denna USB-moj som passar operativsystmet man använder. Jag har Win XP, Win 7 och Win 8. Dessutom skall man ha någon form av GUI som tillåter dig att välja den nya firmwaren och det aktuella kontrollerkortet. Problemet är som vanilgt att det är svårt att veta vad som passar ihop. Efter en snabb koll på nätet skall jag se om dessa två komponenter passar ihop
USB-adaptern finns på http://www.hobbyflyg.com och Flashtoolen finns på http://lazyzero.de/en/modellbau/kkmulticopterflashtool och all annan information finns på ”nätet”. Så det är bara att sätta igång och leta ;-). Det står till exempel på KKMulticopters hemsida att man skall använda ”An ISP programmer with correct installed driver.”? Låter rimligt, eller hur. Men vilken då.
2013-09-22
Efter lite letande och ett mail till KKMulticopter Flashtool så tror jag mig veta att 9XR usbasp skall fungera. Så nu har jag beställning en från hobbyflyg.com 😉

9XR UsbAsp till mitt KK V2 borde klara biffen. Vi får se om ett par dagar.
2013-09-24
Jag provar om denna drivrutin fixar 9XRUsbAsp. Installationen gick bra men den skall provas mot KKMultikopter Flashtool och KK V2 också. Manual för hur anslutning och uppdatering finns på nextcopterplus.

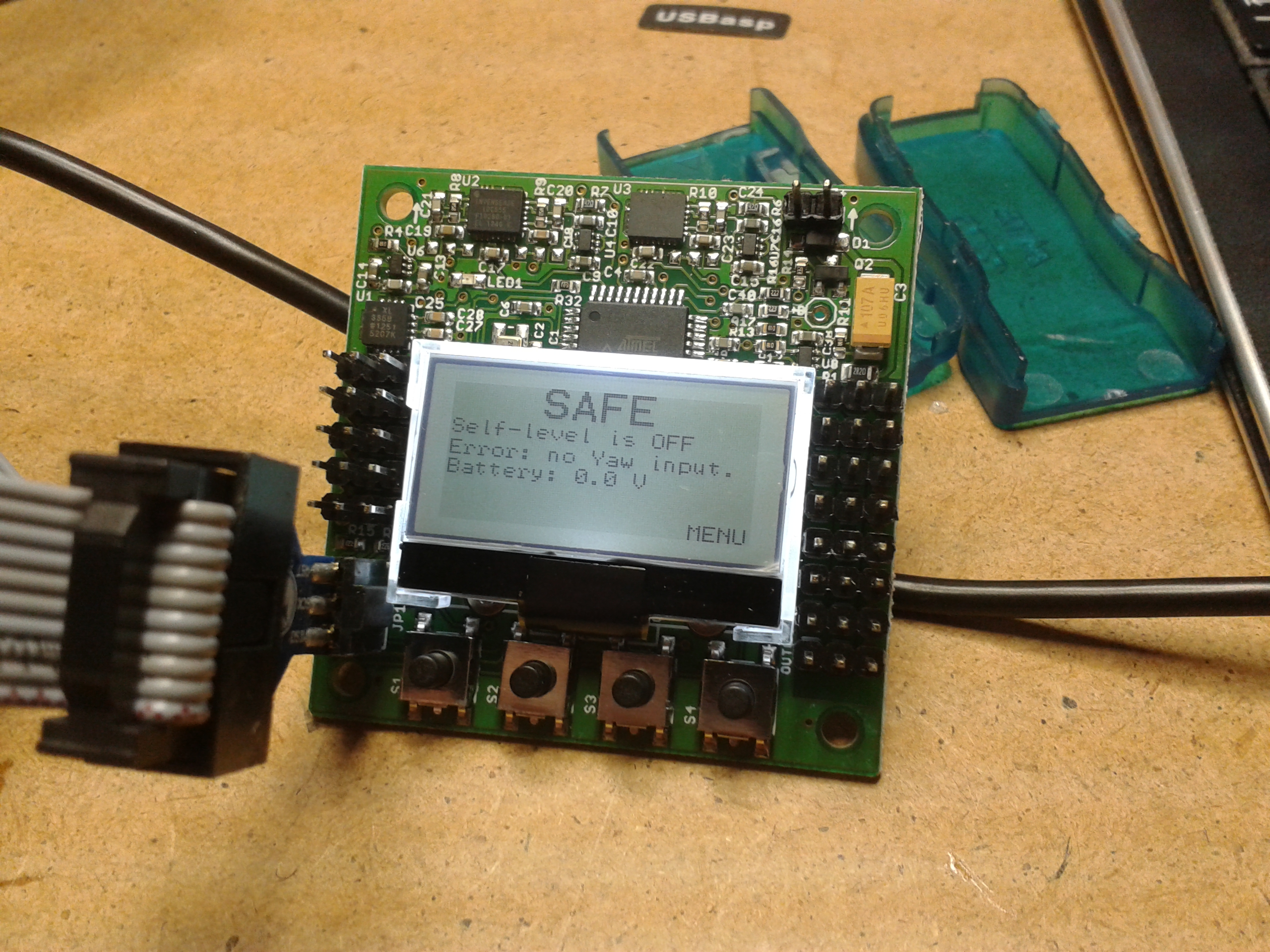
9XR UsbAsp och KK V2 up and running 🙂
2013-09-27
Alla delar har kommit så nu gäller det bara att bygga. Det fanns inga manualer med från Flitetest men det finns på webben. Strukturen bygger man enligt BatBoneBuildLog och Tilt-delen.
2013-09-29
Mina ESC heter Turnigy Multistar 15A och dom har följande standardinställningar. Jag tycker det ser ut som att det skulle duga för en Tri-copter.
- Brake is On, Medium effect
- Timing of motor is automatic
- Acceleration is medium
- Cut off Voltage is medium -> 3.0V
- Cut off mode is Slow down
2013-10-07
Nu har jag fått alla kablar mellan mottagare och KK2-kortet (Rune hade några extra 🙂 och allt verkar fungera. Nu skall jag koppla allt det elektriska.
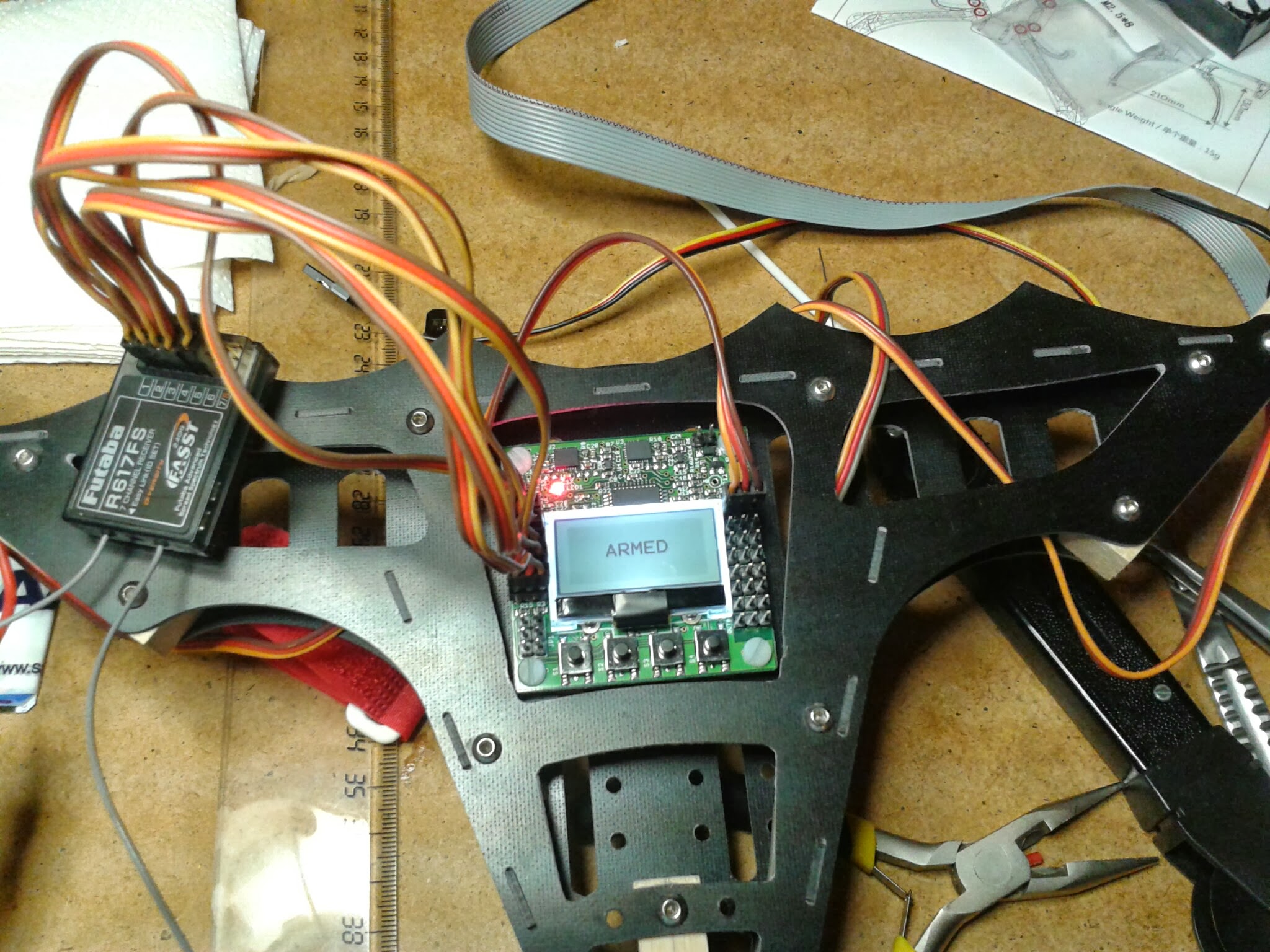
2013-10-08
Nu har jag kommit så långt att det är dags att fundera på justering under flygning. Allt är kopplat och det verkar fungera och till helgen blir det förhoppningsvis premiär.
Detta är det jag försöker göra:
[important]”Manual” från HK Global Warehouse[/important]
Roll/pitch P-tuning:
Set the gains and limits to the following values:
Roll/Pitch P-gain: 30 (For a small 25cm size set to 20)
Roll/Pitch P-limit: 100
Roll/Pitch I-gain: 0
Roll/Pitch I-limit: 20
Yaw P-gain: 50
Yaw P-limit: 20
Yaw I-gain: 0
Yaw I-limit: 10
Now, Increase Roll/Pitch P-gain by 10 (5 or less for a small aircraft) at a time, and test your aircraft
response by hovering and move the left stick in short and fast movements.
As you increase the gain you will notice:
1: The aircraft reacts faster and feels more connected to the stick movement and wander less on its own.
2: The aircraft may oscillate for a short time. Usually a few oscillations, but may be more if gain is high. If it
oscillates continually the gain is too high.
3: The aircraft may be harder to land, it bounces back when touching down.
4: The aircraft may climb.
When the aircraft has a good response and does not oscillate or climb when testing, P-gain is good.
Roll/pitch I-tuning:
1: Trim it level.
2: Fly fast forward and center the stick.
If it level itself, increase I-gain.
If it stays in attitude, I-gain is good.
Alternatively setting I gain to 50-100% of P-gain does the trick.
Yaw P-tuning
Increase Yaw P-gain by 10 (5 or less for a small aircraft) at a time, and test your aircraft response by
hovering and move the Yaw control stick until it have yawed about a quarter of a circle, and then center it.
As you increase the gain you will notice:
1: The aircraft start and stops faster.
2: The aircraft overshoots less.
2: The aircraft may start to climb or descend.
When the aircraft has a good response, has a minimum of overshoot and does not climb or descend, Pgain
is good.
Alternatively, set it to 100% of Roll/Pitch P-gain
Yaw I-tuning
Increase Yaw I-gain by 10 (5 or less for a small aircraft) at a time, do the same test as above.
When the aircraft overshoots even less, I-gain is good.
Alternatively, set it to 100% of Yaw P-gain.
If you have a small and not dangerous aircraft, you can disturb it around the yaw-axis and see if it returns.
increase if not. It is generally good to keep the gain values in the low range. Excessive gain may introduce
vibration and control issues.
2013-10-11
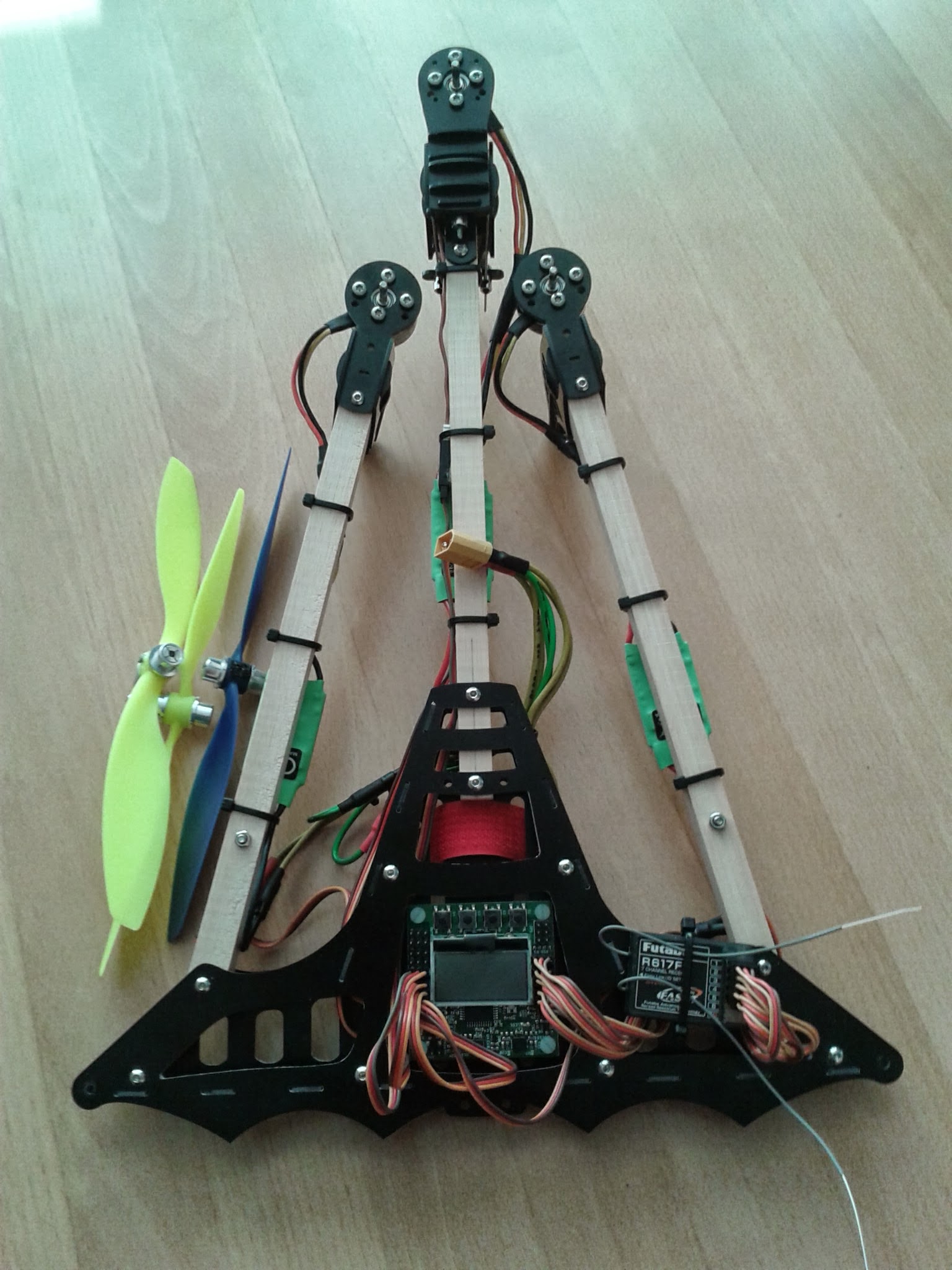
Folded for transportation
2013-10-14
Första ”flygturen”. Jag provade i går men då hade jag missat reverseringen på kompenseringen kanal 4 så den bara snurrade runt men i dag var allt OK. Lite trim så stod den stilla och fint. Nästa steg blir att justera gain ”enligt manualen” (se tidigare inlägg).
2013-11-02
Nu har jag justerat under vindstilla förhållande (inomhus) och flugit lite ute i 2 m/s och kommit fram till följande inställningar. Stabil i hovringen i alla lägen men den oscillerar lite vid ”snabb” flygning. Inget som stör flygningen och inte heller eventuell fotografering/filmning (om det blir en kamera på den) för jag tror inte att jag kommer att flyga så fort om/när jag fotograferar.
- Roll/Pitch P-gain: 40
- Roll/Pitch P-limit: 100
- Roll/Pitch I-gain: 25
- Roll/Pitch I-limit: 20
- Yaw P-gain: 50
- Yaw P-limit: 20
- Yaw I-gain: 50
- Yaw I-limit: 10
2014-01-19
Jag har köpt lite större 3S-accar på 4000mAh mot 2200mAh för att få lite längre flygtid. Inte i första hand för denna Tri men för Quaden men ville ändå prova vad jag skulle få för tid. Jag hade timern på 6 minuter som brukar vara den tid jag får med 2200mAh. Efter denna tid tog jag ner koptern och kollade batteriet och jag hade cirka 50% kvar men mina motorer var så varma så jag skall nog inte köra längre än så. Efter att accarna hade vilat sig ett tag så kollade jag igen och det var 56% kvar.
Vikten på mina 2200mAh accar är 190g och de nya 4000mAh väger 290g men jag tycker att denna viktökning inte borde orsaka att motorerna går så varma som dom gjorde.
2014-02-28
En arm på min Tri var helt jävla sne så jag fick köpa en ny på HornBach. Hittade ingen 30 cm lång så det blev 4.5 meter. Fram med kniven och börja tälja för att få ner den från 15×15 till 13×13 men det gick ganska smärtfritt. Nu återstår att vädret skall tillåta en provtur.
2014-03-29
|
Efter/Före |
P-Gain |
P-Limit |
I-Gain |
I-Limit |
| Roll (Roll&Pitch) |
15/35 |
100/100 |
20/35 |
20/20 |
| Pitch |
15/35 |
100/100 |
20/35 |
20/20 |
| Yaw |
50/50 |
20/20 |
20/50 |
10/10 |
| Level |
50/40 |
20/20 |
– |
– |
Efter: var det värde som gav en stabil flygning ute i lite vind (ca 3-4m/s)
Före: Det värde jag fick med högsta möjliga gain inomhus utan störande vindar.
Notera: Pitch är kopplad till Roll så man behöver bara justera Roll.
Limit är att betrakta som maximalt möjligt utslag.
Ställ sändarens all trim till noll (sub-trim kanal-trim)
Acc Trim Roll:………. -75/0
Acc Trim Pitch:……. -185/0
[important]Detta är de steg jag använder för att ställa in alla parametrar[/important]
1 P-Gain och I-Gain sätts lågt, 0
2 ”Autolevel” sätts till ”off”
3 Öka P-Gain till ”high speed oscillation”
4 Minska P-Gain till stabilt läge
5 Öka I-Gain till ”low speed oscillation#
6 Minska I-Gain till stabilt läge
7 Med Autolevel ungefär som P-Gain, justera för att kolla läget
8 Justera Acc Trim Roll och Pitch till stabilt läge ”hands off”
P-Gain kan behöva justeras ner under blåsiga förhållanden
Roll: Skevroder (roll)
Pitch: Höjdroder
Yaw: Sidoroder
Exempel på justering (http://www.youtube.com/watch?v=U7pWroCxL38)
P-Gain oscillation à 3:22
I-Gain oscillation à 3:40
2015-11-23
Nu har denna farkost fått ett nytt hem. Hoppas den flyger bra och länge.